
Many Sensorless Problems are Difficult to Solve
- belief state 의 개수가 너무 많아지기 때문에 실제로 구현하기 어렵다.
- 10 x 10 vacuum world 의 initial belieft state 는 100 x 2^100 = 10^32 의 physical states 를 가질 수 있다.
- Solution :
Incremental belieft-state search : {1,2,3,4,5,6,7,8} 의 physical state 가 존재할 때 1번 physical state 부터 시작해서 solution 을 탐색하고, 그 solution 을 2번 ,,, 8번 state 에 적용해본다.
그러나 8-puzzle 와 같은 경우에는 sensing 없이 푸는 것이 매우 어렵다.
Searching with partial observations
- local-sensing vacuum world
- position sensor, local dirt sensor -> [A, Dirty]
Transitions in a Pratially Observable World
Prediction(state) -> observation prediction -> update
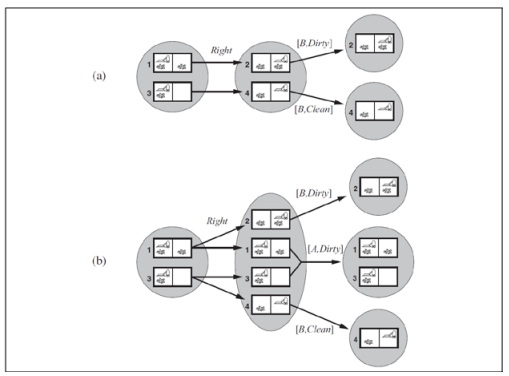
(a) 현재 belief state 가 {1,3} 을 가지고 있을 때, Right action 을 취한다. 이때 belief state 는 {2,4} 가 될 수 있다.
여기서 observation prediction 이 주어진다면 {2,4} state 중 어느 state 인지 알 수 있게 된다.
즉, agent 가 세 개의 stage 를 거쳐서 search tree 를 만들어나가게 된다.
(b) 현재 belief state 가 {1,3} 일때 right action 을 취하면 non-deterministic 성질에 의해 {1,2,3,4} 의 belief state 가 될 수 있다. 이때 observation prediction 이 주어진다면 {1,2,3,4} 중 state 가 결정이 되고 transition model 이 완성된다.
AND-OR Search for the Local-Sensing Vacuum World
- Initial percept : {1,3}
- Solution : [Suck, Right, if Bstate={6} then Suck else []]

위는 agent 가 search tree 를 만들어 나가는 과정이다. 즉, 실제로 agent 가 action 을 취하면서 goal 로 가는 것이 아니라 agent 컴퓨터 내부에서 search 알고리즘이 수행되는 과정이다.
An Agent for Paritally Observable Environments
- solution 은 contingency plan 이 된다.
- agent 는 항상 percept 를 이용해서 belief state 를 업데이트하고 유지해야 한다.
- kindergarten vacuum worlds : 어느 방이라도 다시 먼지가 생길 수 있다.
- ex)

Maintaining One's Belief State
- 실제 robot 같은 경우에 partially observable , non-deterministic 하므로 belief state 를 유지하고 확인하는 것이 핵심 기능이 된다.
- 이러한 기능을 Monitoring, filtering, state estimation 이라고 부른다.
- localization 이라고 가장 많이 불린다.

Sonar 센서를 통해 N,S,E,S 위치를 파악할 수 있다.

댓글